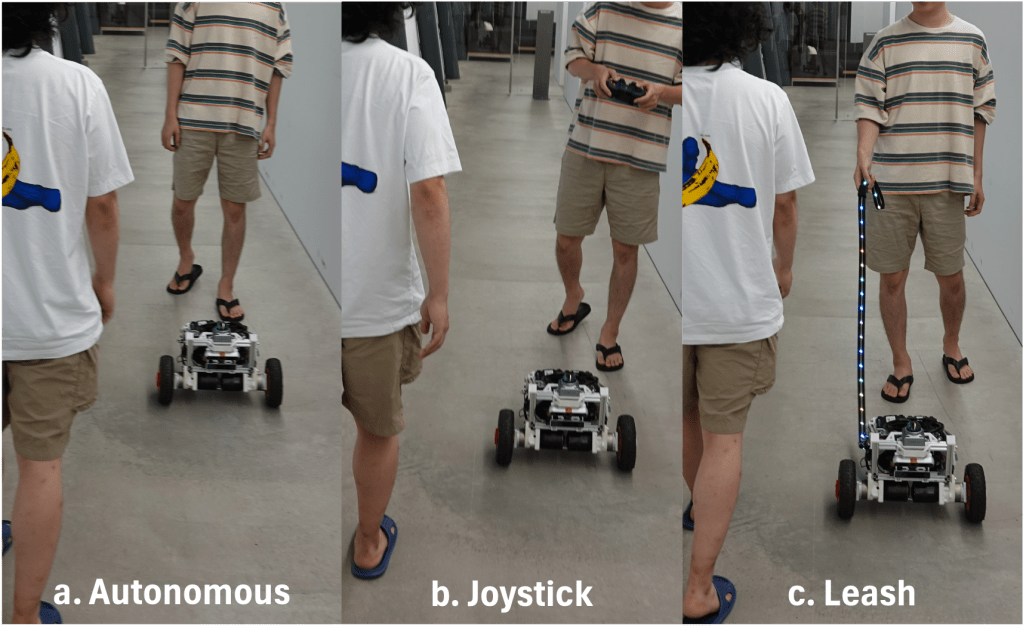
Unexpected robot encounters in public spaces can cause discomfort for third parties, yet the acceptability of accompanying robots is not yet fully understood. Visual cues strongly influence robot impressions; however, the interaction between explicit visual indicators and individual robot resistance in determining acceptability remains unexplored. We investigated how visual relationship indicators—connection visibility (the physical linkage between the robot and handler) and control visibility (the evident authority of the handler)—influence acceptance based on individuals’ levels of robot resistance. In our experiment, 23 participants encountered a mobile robot under three operation methods: Autonomous (no visual indicators), Joystick (only control visibility), and Leash (both connection and control visibility), with participants divided into high-resistance (n=12) and low-resistance (n=11) groups based on their NARS scores. Results indicate that Leash had the highest acceptability, with high-resistance participants showing significant differences across methods and benefiting from explicit visual indicators, unlike low-resistance participants who were largely unaffected. These findings offer important design implications for accompanying robots in public spaces, suggesting that employing visually explicit relationship indicators is an effective strategy for enhancing acceptability, particularly among individuals with robot resistance.
公共空間での予期せぬロボットとの遭遇は第三者に不快感を招く可能性がありますが、人と協働して移動するような同伴ロボットの受け入れ可能性は未だ十分に理解されていません。視覚的ヒントはロボットの印象に強く影響しますが、明示的な視覚的指標と個人のロボット抵抗との相互作用が受け入れ可能性を決定するメカニズムは未解明のままです。私たちは、視覚的関係指標——接続の可視性(ロボットと操作者との物理的な接続)と制御の可視性(操作者の明確な権限)——が、個人のロボット抵抗のレベルに基づいて受け入れ可能性にどのように影響するかを調査しました。実験では、23名の参加者が3つの操作方法(自律型(視覚的指標なし)、ジョイスティック型(制御可視性のみ)、リード型(接続と制御の可視性両方))で移動ロボットと遭遇し、参加者はNARSスコアに基づいて高抵抗群(n=12)と低抵抗群(n=11)に分けられました。結果によると、リード方式が最も高い受け入れ度を示し、高抵抗群の参加者は方法間で有意な差を示し、明示的な視覚的指標から恩恵を受けたのに対し、低抵抗群の参加者はほとんど影響を受けませんでした。これらの結果は、公共空間における同伴ロボットの設計に重要な示唆を提供し、特にロボット抵抗を有する個人に対して、視覚的に明示的な関係指標を採用することが受け入れ度を向上させる有効な戦略であることを示しています。
Publication
Momo Hanawa, Satomi Tokida and Yoshio Ishiguro. “Leash as a Cue:
Visual Indicators for Third-Party Acceptance Across Resistance Levels.” 2025 34th IEEE International Conference on Robot and Human Interactive Communication (ROMAN). IEEE, 2025.
